Introduction
In a Markov chain process, there are a set of states, and we progress from one state to another based on a fixed probability. Figure 1 displays a Markov chain with three states. E.g. the probability of a transition from state C to state A is .3, from C to B is .2, and from C to C is .5, which sum up to 1 as expected.
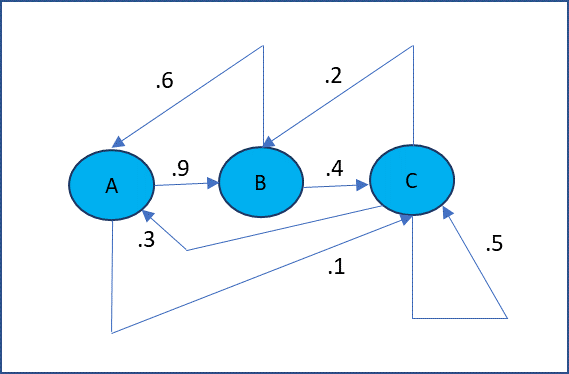
Figure 1 – Markov Chain transition diagram
The important characteristic of a Markov chain is that at any stage the next state is only dependent on the current state, and not on previous states; in this sense, it is memoryless.
Definitions
Definition 1: A (finite) Markov chain is a stochastic process x0, x1, … such that each xi belongs to some finite set S such that the probability that xi+1 has outcome s in S only depends on the value of xi, i.e.
P(xi+1 = s | x0 = s0, x1 = s1, …, xi = si) = P(xi+1 = s | xi = si)
for any states s0, s1, …, si, s.
We will further assume that the Markov chains are time-homogeneous (i.e. stationary), i.e. for any i
P(xi+1 = s | xi = r) = P(x1 = s | x0 = r)
Now, define the (one-step) transition probability from state r to s by
prs = P(xi+1 = s | xi = r)
Thus, clearly for all r, s in S
as in Property 1 of Discrete Probability Distributions.
A Markov chain is completely determined by the distribution of the initial state x0 and the transition probabilities prs.
k-step transitions
Now, define the k-step transition probability from state r to s by
![]()
Clearly, p1rs = prs.
Properties
Property 1 (Chapman-Kolmogorov): For any k
Proof: Using the law of conditional probabilities and the Markov chain assumptions, we have


Property 2: Assuming that x0 = r, the expected number of times xi = s for 1 ≤ i ≤ n is
![]()
Proof: For fixed r and s, define the stochastic process yi as follows
![]()
Thus
![]()
![]()
Now define the random variable
![]()
It now follows that
![]()
which proves the result.
Transition Matrix
Definition 2: Assuming that the set of states is specified as S = {1,…, n}, we define the n × n (one-step) transition matrix to be P = [pij] (here we are using indices such as i, j to represent the states).
It now follows from Property 1 that Pk = [pkij] where Pk is the matrix P multiplied by itself k times, i.e. Pk is the k-step transition matrix.
A Markov chain can also be described by a transition diagram that consists of a finite set of states connected by arrows; these represent the transition probabilities, as shown in Figure 1.
Definition 3: A state s is called an absorbing state if pss = 1. A Markov chain is an absorbing Markov chain if there is one or more absorbing states such that any state eventually arrives at an absorbing state.
If a Markov chain arrives at an absorbing state, then it stays in that state forever. An absorbing Markov chain eventually arrives at an absorbing state, no matter what the initial state is.
References
Fewster, R. (2014) Markov chains
No longer available online
Pishro-Nik, H. (2014) Discrete-time Markov chains
https://www.probabilitycourse.com/chapter11/11_2_1_introduction.php
Norris, J. (2004) Discrete-time Markov chains
https://www.statslab.cam.ac.uk/~james/Markov/
Lalley, S. (2016) Markov chains
https://galton.uchicago.edu/~lalley/Courses/312/MarkovChains.pdf
Konstantopoulos, T. (2009) Markov chains and random walks
https://www2.math.uu.se/~takis/L/McRw/mcrw.pdf