Objective
Using the approach described in Euler’s Forward Method for solving differential equations, we now explore three other methods. These are Euler’s backward method, the Trapezoid method, and the Runge-Kutta method.
Euler’s Backward Method
This method is based on the following approximation to a derivative.
![]()
It follows that
![]()
This means that the system is characterized by
yi+1 = yi + h f(xi+1, yi+1) y0 = constant
Since we have yi+1 on both sides of the equation, we don’t have an explicit solution. Instead, we need to find the root of an equation of form
yi+1 – yi – h f(xi+1, yi+1) = 0
e.g. by using Newton’s method. Alternatively, we can make an initial estimate for yi+1 using Euler’s forward method, namely
![]()
We then apply a fixed point iterative approach as follows
![]()
Fortunately, convergence is usually quite rapid. One iteration is often sufficient, in which case
yi+1 = yi + h f(xi+1, yi + f(xi, yi))
Example 1: Repeat Example 2 of Euler’s Forward Method using Euler’s Backward method with two iterations.
The result is shown in Figure 1.
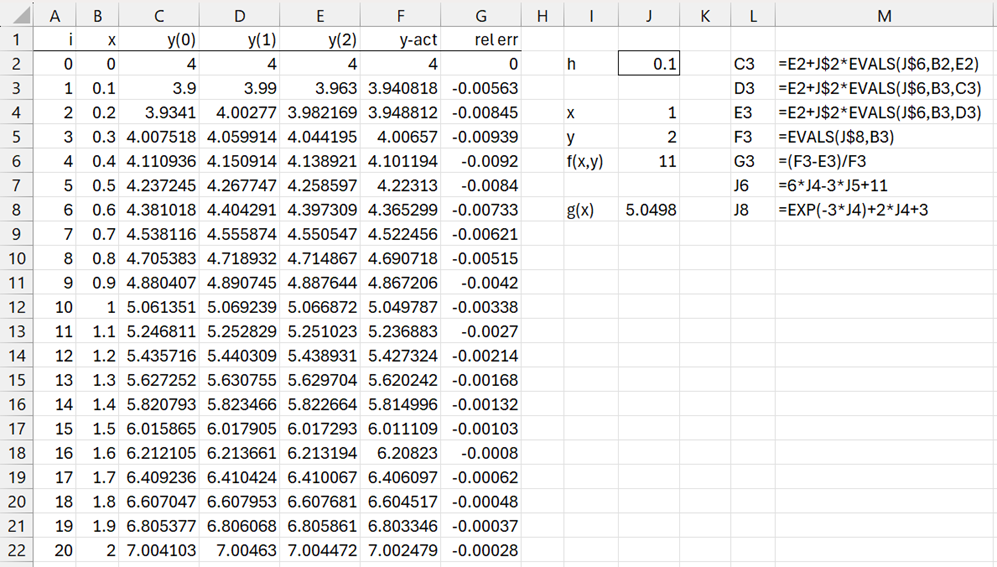
Figure 1 – Euler Backward Method
For this example, the results are fairly similar to those obtained for Example 2 in Euler’s Forward Method.
Trapezoid Method
As we see in Numerical Integration

This estimate is especially accurate over a small interval [a, b]
Thus to solve
y′(x) = f(x, y(x))
we can take the integral of both sides from xi to xi+1 to obtain

and so
![]()
![]()
This motivates the iterative process
![]()
As for the Euler Backward algorithm, this requires an implicit solution. A similar approach is to use the Euler Forward algorithm for the initial guess.
![]()
and then
![]()
Note that the Trapezoid method with one iteration is called Heun’s method.
Example 2: Repeat Example 1 using the Trapezoid method with two iterations.
The results are shown in Figure 2.
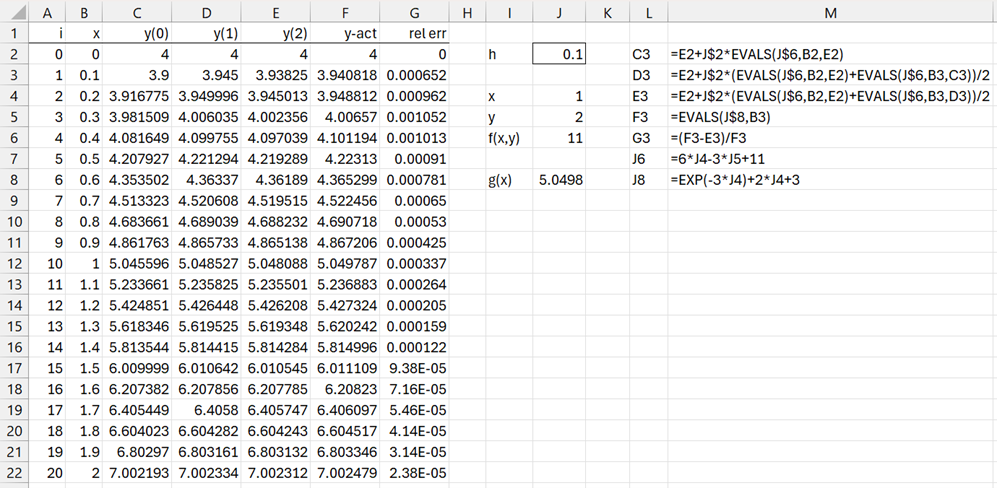
Figure 2 – Trapezoid method
This approach provides better estimates for y(2), with relative error of 0.00238%.
Runge-Kutta (RK2) method
This method attempts to make a better approximation by using an expanded version of the Taylor series. This method uses the following explicit iterative approach:
yi+1 = yi + hF(xi, yi)
where
 This means that
This means that

Typical choices for b are 1/2, 2/3, 3/4, and 1. The case where b = 1/2 is Heun’s method. b = 1 results in the midpoint method, and b = 2/3 is Ralston’s method.
Example 3: Repeat Example 1 using the Runge-Kutta Method with b = ½.
The results are shown in Figure 3.
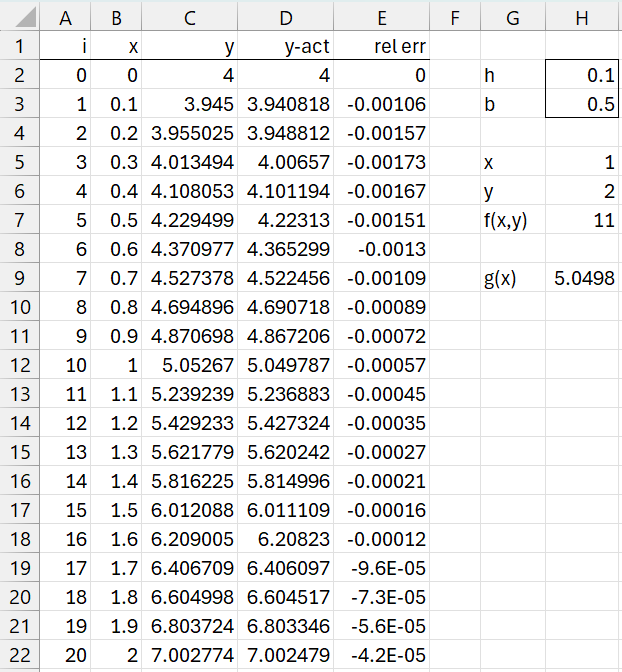
Figure 3 – Runge-Kutta Method
Here, cell C3 contains the formula
=C2+H$2*(1-H$3)*EVALS(H$7,B2,C2)+ H$2*H$3*EVALS(H$7,B2+H$2/(2*H$3),C2+H$2/(2*H$3)*EVALS(H$7,B2,C2))
Not surprisingly, the estimate for y(2) is comparable to the Trapezoid method.
Runge-Kutta (RK4) method
There is an extended version of the Runge-Kutta method described above. This method uses the following iterative approach:
k1 = hf(xi, yi, zi)
k2 = hf(xi+h/2, yi+k1/2, zi+m1/2)
k3 = hf(xi+h/2, yi+k2/2, zi+m2/2)
k4 = hf(xi+h, yi+k3, zi+m3)
yi+1 = yi + (k1+2k2+2k3+k4)/6
See Differential Equations Analysis Tool for an example using RK4.
Interpolation
Example 4: Repeat Example 3 to find the solution to the differential equation when x = 1.12.
We have two choices. We could select a value of h that evenly divides 1.12. E.g. h = .01 or h = .02. If, however, we stick with h = .1, then we can use interpolation. To keep things simple, we will use linear interpolation (see Interpolation), as described in Figure 4 (with reference to the analysis shown in Figure 3).
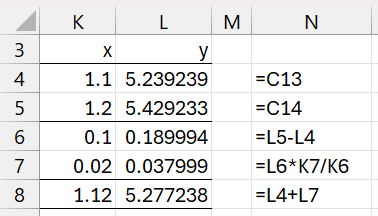
Figure 4 – Linear interpolation
The linear interpolation estimate is y(1.12) = 5.277238 (cell L8).
Examples Workbook
Click here to download the Excel workbook with the examples described on this webpage.
Links
↑ Numerical differential equations
References
Strang, G., Herman, E., Seeburger, P. (2025) Introduction to differential equations
https://math.libretexts.org/Courses/Monroe_Community_College/MTH_211_Calculus_II/Chapter_8%3A_Introduction_to_Differential_Equations/8.1%3A_Basics_of_Differential_Equations
Atkinson, K., Han, W., Stewart, D. (2009) Numerical solutions to ordinary differential equations. Wiley-Interscience
https://homepage.math.uiowa.edu/~atkinson/papers/NAODE_Book.pdf
Wilson, H. J. (2025) Ordinary differential equations
https://www.ucl.ac.uk/~ucahhwi/GM01/ODE_extra.pdf
Wikipedia (2025) Numerical methods for ordinary differential equations
https://en.wikipedia.org/wiki/Numerical_methods_for_ordinary_differential_equations