Basic Concepts
Spline fitting or spline interpolation is a way to draw a smooth curve through n+1 points (x0, y0), …, (xn,yn). Thus, we seek a smooth function f(x) so that f(xi) = yi for all i. In particular, we seek n cubic polynomials p0, …, pn-1 so that f(x) = pi(x) for all x in the interval [xi, xi+1].
Property 1: The polynomials that we are seeking can be defined by
pi(x) = ai(x–xi)3 + bi(x–xi)2 + ci(x–xi) + di
where for i = 0, …, n-1![]()
![]()
![]()
based on hi = xi+1 – xi and ki = yi+1 – yi. The bi coefficients are defined via matrix operations as follows. First define for i = 1, …, n
Now define U = [uij] to be an n+1 × n+1 matrix where i, j = 0, …, n and
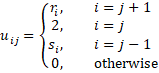
and define B = [bi] and V = [vi] to be n+1 × 1 matrices where the vi are as defined above and B is defined by
B = U-1V
Proof: See Derivation of Spline Polynomials. The proof uses calculus.
Example
Example 1: Create a spline curve that passes through the four points in range B4:C7 of Figure 1.
The coefficients for the three cubic polynomials p0, p1 and p2 are shown in range B16:E18 of Figure 1. We show how to calculate these parameters in the rest of the figure.

Figure 1 – Spline curve calculation
Figure 2 displays some of the representative formulas in Figure 1.
| Cells | Entity | Formula |
| B4 | x0 | input data |
| C4 | y0 | input data |
| F4 | h0 = x1 – x0 | =B5-B4 |
| G4 | h0 + h1 | =F4+F5 |
| H4 | k0 = y1 – y0 | =C5-C4 |
| I4 | k0/h0 | =H4/F4 |
| B11 | u10 = h0/(h0 + h1) | =F4/G4 |
| C11 | u11 = 2 | 2 |
| D11 | u12 = 1 – u10 | =1-B11 |
| E11 | u13 = 0 | 0 |
| G11 | v1 = 3(k1/h1–k0/h0)/(h0+h1) | =3*(I5-I4)/G4 |
| I10:I13 | B | =MMULT(MINVERSE(B10:E13),G10:G13) |
| B17 | a1 = (b2 – b1)/(3h1) | =(I12-I11)/(3*F5) |
| C17 | b1 | =I11 |
| D17 | c1 = k1/h1 – h1(b2+2b1)/3 | =I5-F5*(I12+2*I11)/3 |
| E17 | d1 = y1 | =C5 |
Figure 2 – Representative formulas from Figure 1
We see from Figure 1, for example, that the second of the spline polynomials is
p1(x) = .000774x3 – .01747x2 + .196109x + 1.791759
Now the spline function f(x) = p0(x) for x in the interval [2, 5], f(x) = p1(x) for x in the interval [5,13] and f(x) = p2(x) for x in the interval [13, 15]. We capture this for the values of x between 2 and 15 in Figure 3.

Figure 3 – Spline curve fit
Here, we placed the formula =B$16*(K4-B$4)^3+C$16*(K4-B$4)^2+D$16*(K4-B$4)+E$16 in cell L4. We then highlighted the range L4:L6 and pressed Ctrl-D to fill in the function values corresponding to the first interval [2, 5]. For the interval [5, 13], we inserted the formula =B$17*(K7-B$5)^3+C$17*(K7-B$5)^2+D$17*(K7-B$5)+E$17 in cell L7, highlighted range L7:L14 and pressed Ctrl-D. Finally, for the interval [13, 15], we inserted the formula =B$18*(K15-B$6)^3+C$18*(K15-B$6)^2+D$18*(K15-B$6)+E$18 in cell L15, highlighted the range L15:L17 and pressed Ctrl-D.
Plot
We next highlighted range K4:L17 and selected Insert > Charts|Scatter using the Scatter with Smooth Lines option to obtain the blue curve on the right side of Figure 3.
Finally, we note that the original data values in range B4:C7 of Figure 1 were selected based on the function h(x) = ln(x+1) for x = 2, 5, 13, and 15. In fact, when we insert the graph of this function into Figure 3 (the red curve), we see that the spline function is a pretty good fit for the natural log function based only on interpolating between four points.
Real Statistics Support
Click here for a description of the Real Statistics function and data analysis tool that simplifies the process of creating a spline curve in Excel.
Examples Workbook
Click here to download the Excel workbook with the examples described on this webpage.
Links
References
Chen, M-Q (2013) Cubic spline interpolation
The link is no longer available.
Jameson, A. (2019) Cubic splines
The link is no longer available.
Dunbar D. (2001) Cubic spline (Excel VBA implementation)
The link is no longer available.
Keesling, J. (2026) Cubic splines
https://people.clas.ufl.edu/kees/files/CubicSplines.pdf
Artley, B. (2022) Cubic splines: the ultimate regression model
https://medium.com/data-science/cubic-splines-the-ultimate-regression-model-bd51a9cf396d
Huettig, A. (2020) Linear and cubic splines
https://iu.pressbooks.pub/abigailehuettig/chapter/linear-and-cubic-splines
Hello Charles,
I am trying tu use the Excel sheet which is for download. I exchanged the X/Y data to:
X Y
10 13
20 32
30 38
50 60
But I have got a very distorted curve, not a real spline. Probably the matrix did not function with these numbers. If I could attach a file or at least screen shot you could see it.
Best regards
Hello Dieter,
Thanks for sending me your data. I will look at it shortly.
Charles
Hello Dieter,
Thanks for sending me the spreadsheet.
I just ran the Real Statistics Spline Curve Fit data analysis tool on your data, and obtained a nice smooth curve. See my response to your email.
Charles
Hi Charles,
Can you share the formula for the log transformation?
Thanks,
Paddy
Hi Paddy,
For a random variable x, the log transformation is log x. The log can be any base you like. Base e, the natural log, is expressed in Excel as LN(x). Based 10 is LOG10(x).
Charles
Hi, I was wondering if you could explain why the constant 2 is used and what this means? What happens if you changed this constant?
See https://www.real-statistics.com/other-mathematical-topics/spline-fitting-interpolation/derivation-spline-polynomials/
Charles
Hi Charles,
I think D11 u12 = 1 – u01 =1-B11 should be : D11 u12 = 1 – u10 =1-B11 in figure 2.
I haven’t had to use matrix maths since Uni. 30 years ago so it took me a while to get the hang of this. It works. Thanks for the tutorial.
Best regards, Nigel
Hi Nigel,
Yes, you are correct. Thank you for catching this error. I have now corrected it on the website.
I appreciate your help in improving the accuracy and usefulness of the Real Statistics website.
Charles
Hi Charles,
Thanks for the correction. I also spotted a minor error, probably just a typo,
L4 k0/h0 =H4/F4
should be
I4 k0/h0 =H4/F4
I thought your derivation of the spline polynomials was excellent. Nicely done, and I now understand why the tridiagonal matrix works.
Yes, this too was incorrectly written. I have now made the correction.
Glad that my explanation was helpful and thanks for your help.
Charles
Thanks Charles, very informative.
I think there is a mistake in the representative formulae:
K4 k0 = y1 – y0 =B5-C4
should be
H4 k0 = y1 – y0 =C5-C4
Regards RW.
Hello RW,
Yes, you are correct. Thank you very much for identifying this error.
I have now corrected the error on the webpage.
I appreciate your help in improving the accuracy and usefulness of the website.
Charles